产品特点
高速点焊
通过减小手臂重量,采用高输出真旋转电机、新型防振控制等来缩短占点焊操作主要部分的短节距操作时间,再者通过改良问服焊枪的枪轴操作顺序,大幅缩短周期时间。
内置电缆、气管
通过在上臂和手院的中心处设中空部分,从机器人基部到豌部未端内置电缆和气管等成为可能。由此,离线示教时或者安装机器人后,无需考虑原来外部缠绕方式导致的与邻接机器人或者周边设备的电缆或气管之间相互产生干涉的问题。同时线下以及现场示教作业效率也得到大幅提高。
提高安装自由度
由于与传统机型相比,安装面积和机身尺寸大大减小,因此电缆和气管内置的同时可以以高密度安装机器人。
产品参数
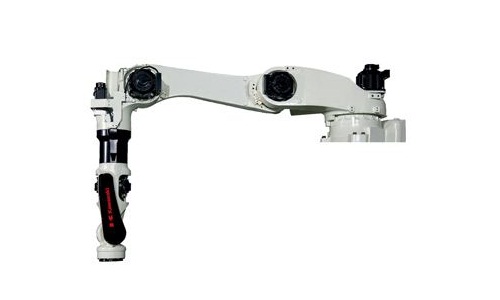
-手臂类型:多关节型机器人
-自由度 (轴):6
-**大负载能力 (kg):200
-**大臂展 (mm):3,151
-重复定位精度 (mm)✽1:±0.08
动作范围 (°)
-手臂旋转 (JT1) :±160
-手臂前后 (JT2) :+80 - -130
-手臂上下 (JT3) :+90 - -75
-手腕旋转 (JT4) :±210
-手腕弯曲 (JT5) :±125
-手腕扭转 (JT6) :±210
**大速度 (°/s)
-手臂旋转 (JT1) :105
-手臂前后 (JT2) :85
-手臂上下 (JT3) :100
-手腕旋转 (JT4) :120
-手腕弯曲 (JT5) :120
-手腕扭转 (JT6) :200
允许负载扭矩 (N•m)
-手腕旋转 (JT4) :1,334
-手腕弯曲 (JT5) :1,334
-手腕扭转 (JT6) :588
允许负载惯量 (kg•m2)
-手腕旋转 (JT4) :199.8
-手腕弯曲 (JT5) :199.8
-手腕扭转 (JT6) :154.9
-重量 (kg):1,100
-安装方式:支架
-安装条件环境温度 (°C) :0 - 45
-相对湿度 (%) :35 - 85 (无结露)
-控制柜 / 所需电源 (kVA):E02 / 7.5
-保护等级:手腕 : IP67同等 基座 : IP54同等