施釉是陶瓷产品生产过程的一个重要工序。施釉方法有喷釉、浸釉、浇釉、涂刷釉等。其中喷釉是利用压缩空气将釉浆通过喷枪喷涂到产品坯体上。喷釉产生的釉层厚度比较均匀,便于操作,尤其适合卫生洁具这类体型较大、形状复杂的产品施釉。喷釉时喷枪与坯体的距离、角度、喷枪移动速度等决定了施釉的质量,这就对操作工人提出了很高的要求,另外喷涂粉尘对操作工人也十分有害。所以采用机器人代替人工喷釉是个很好的选择,不仅能保证施釉质量,还可大大提高工作效率,减轻工人劳动强度,保障工人身体安全。
近年来机器人施釉已越来越多的被生产企业所采用,本文是以我公司为某生产企业开发和实施的卫生洁具机器人施釉系统的工程实例为背景,介绍和阐述一种典型的机器人施釉系统。
1.工程的实施背景
目前,国内有200多家卫生洁具生产企业,其施釉作业普遍采用人工方式,工人劳动强度大,工效低,产品质量不稳定。而在国外机器人施釉已是比较成熟的技术,已被广泛使用。国内也有企业从国外引进机器人施釉系统,但成本很高且作业方式不太适合国情。
我公司利用自己的机器人系统结合国内唐山、北京等卫生洁具生产企业实际需要开发研制的机器人施釉系统已被广泛使用。
2.系统构成和主要机构的结构特点及工作原理
机器人施釉系统主要由一台机器人、两套转臂及转台、一套收釉装置、一套工作间、一套喷釉系统及一套电气控制系统组成,如图1所示。
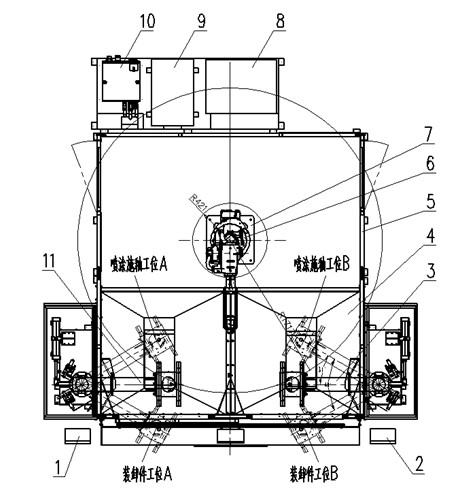
图1 系统构成示意图
1操作盘A 2操作盘B 3转臂及转台B 4收釉装置
5工作间 6机器人HP20D 7机器人基座 8 PLC控制柜
9变压器 10机器人控制柜DX100 11转臂及转台A
该系统设有A、B两个工位。每个工位设置有一套转臂及转台,两套转臂及转台对称设置。每个转台通过转臂动作可转到喷涂施釉工位和装卸件工位。当一个转台转到喷涂施釉工位,机器人对该转台上工件进行喷涂工作时,另一转台可以转出工作间、转到装卸件工位,并在人工卸下喷涂好的工件、换上新的待喷涂工件后再转回到工作间内的喷涂工位,等机器人喷涂完前一转台上工件后,马上对该转台上的工件进行喷涂。机器人如此交叉作业,可以提高机器人的使用效率。
下面结合工程实例详细介绍该系统各部分主要组件的结构特点及工作原理。
2.1机器人系统的构成和结构特点
本系统所选用的Motoman-HP20D机器人,是日本株式会社安川电机当前最先进的机器人,包括机器人本体、机器人控制柜(YASNAC DX100)、示教盒(P.P)三部分及供电电缆。
Motoman-HP20D机器人采用的新型交流伺服电机,具有结构紧凑、高输出、响应快、高可靠性等特点。因此,使HP20机器人本体更紧凑、更灵活。同时,具有了更大的运动空间和更好的稳定性,以及可以适应各种工艺姿态的卓越性能。
机器人本体为全轴防尘、防水型。
机器人控制柜YASNAC DX100的基本功能是控制机器人本体的六个轴,而在本系统中增加了对两个外部轴的控制。
2.2转臂及转台的结构特点及工作原理
转臂及转台主要由转臂基座(3)、转臂(2)、转台(1)、转臂驱动气缸(1)及转臂缓冲器(5)等组成。如图2所示。转臂采用气缸驱动,通过电磁阀组件控制,在转臂的两个极限位置上设有缓冲装置、定位块和极限开关。转臂的转速由气缸调速阀调节。
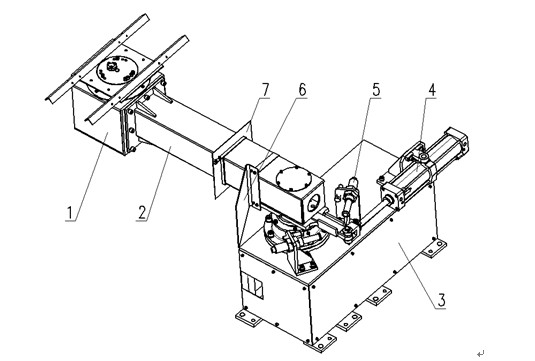
图2转臂及转台示意图
1转台 2转臂 3转臂基座 4转臂驱动气缸
5转臂缓冲器 6密封板 7挡板
转臂用于支承转台并使转台在装卸工位和喷涂工位之间转换。如图3所示:转臂回转角度约60度;转台转到装卸工位时,人工在转台上装卸工件;转台转到喷涂工位时,机器人对转台上的工件进行喷涂施釉工作。
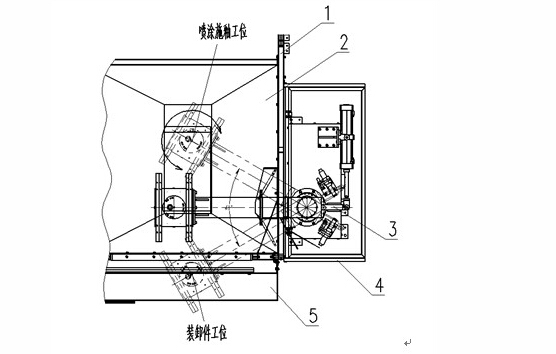
图3 转臂及转台工作示意图
1工作间 2室内收釉漏斗 3转臂及转台
4转臂护罩5室外收釉漏斗
转台用于支撑工件并使工件在水平面上回转,便于机器人对其圆周各面均匀喷釉。转台驱动方式采用1.3kw伺服电机,并作为机器人外部轴由机器人统一控制,所以在机器人施釉同时,转台可以很完美的配合机器人的喷涂动作,达到较高的施釉质量。伺服电机和RV减速机采用直联方式,以减小转台的外型尺寸。转台最大承载约60Kg。
转台在设计上充分考虑了防尘、防水,除了选用防护等级较高的电机和减速机外,还在结构上做了防飞溅防护。另外转台除通过转臂内部通到工作间外的电缆通道外,自身完全封闭,所有联接处都设置了密封胶圈。
2.3工作间的构成和结构特点
工作间主体分为两部分。前半部分为喷釉部分,全部为不锈钢结构;后半部分为机器人部分,采用型钢焊接框架贴有机玻璃板结构。工作室外形尺寸为:长3200mm×宽4200mm×高2500mm。
工作间后部开有两扇维护门,用于人员进入工作间对机器人系统和喷釉系统进行维护,也用于将室内收釉小车拉出工作间。维护门设有安全锁,用于工作间进出门的安全防范,当操作人员打开安全锁进入工作室时,机器人会停止工作,保证操作人员的安全。
工作间前侧设有两个工件进出口,并设有一气缸驱动的推拉门。每个工件进出口设置一套转臂转台,转臂转到工作间内转台对应的为喷涂施釉工位,转到工作间外转台对应的工件装卸工位,如图3所示。哪个进出口的转台转到喷涂工位,推拉门就挡住哪个进出口,同时另一进出口打开。两个喷涂工位间设有工位隔板。工位隔板、推拉门和侧墙在停留在喷涂工位的转台周围构成一个较封闭的空间,对喷涂施釉工作进行防护,防止釉浆、粉尘飞溅。机器人在封闭工位进行喷涂作业的同时,另一转台可以转出工作间,转到装卸件工位,以便人工卸下喷涂好的工件并换上新的待喷涂工件。
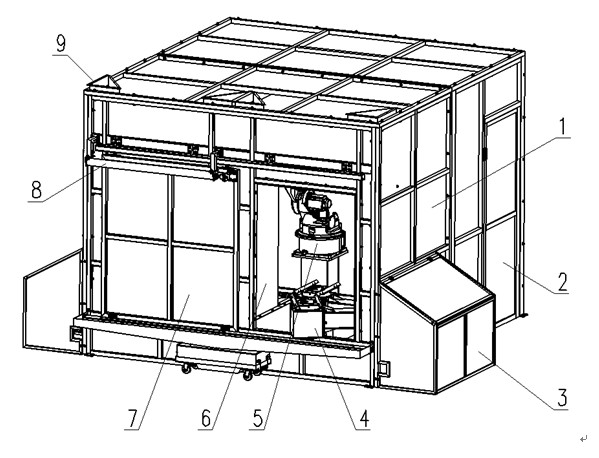
图4 工作间结构图
1工作间主体 2维护门 3转臂护罩 4转臂及转台
5机器人及其基座 6工位隔板 7推拉门
8推拉门驱动气缸 9除尘管道接口
工作间内每个工位的两侧墙上都设有除尘窗口,喷釉作业时釉浆雾化的粉尘可以通过除尘窗口被除尘设备吸走,以免其飘散在空气中污染工作环境。除尘设备可以单独配套也可以使用客户现有车间除尘设备。工作间顶部设有除尘管道接口,如图4所示。
2.4收釉装置的构成和结构特点
喷釉时会有很大一部分釉浆没有喷到或没有附着在工件上,所以釉浆回收装置是系统必须设置的。
收釉装置由两套室内收釉漏斗(6)、两辆室内收釉小车(5)、一套室外收釉漏斗(3)、一辆室外收釉小车(4)和工位隔板(7)、侧墙板等构成。
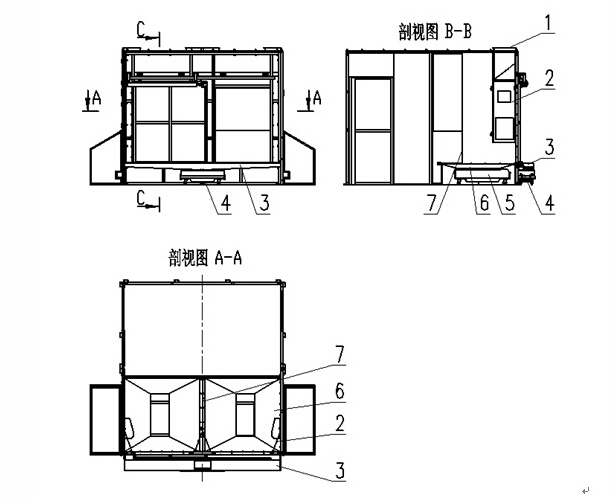
图5 回收装置结构图
1除尘管道接口 2除尘窗板 3室外收釉漏斗 4室外收釉小车
5室内收釉小车 6室内收釉漏斗 7工位隔板
室内收釉漏斗设置在喷釉工位下方,室内收釉小车放置在漏斗下方。小车采用万向轮,可通过工作间的维护门拉出工作间进行釉料回收。
室外收釉漏斗设置在工作间推拉门和居装卸件工位转台的下方,以回收推拉门和转台上滴落的釉浆。室外收釉小车回收室外收釉漏斗接存的釉料。
2.5喷釉系统和电气控制系统简介
喷釉系统由喷枪、供釉管路和釉罐等组成。喷釉系统一般由生产企业根据自己的实际情况确定。喷枪和釉路采用电磁阀压缩空气控制。
电气控制系统硬件部分主要由系统控制柜(PLC)、系统操作盒及机器人控制柜(DX100)等组成。采用集中控制方式,通过系统控制柜(PLC)实现控制。通过操作盒可进行系统的启动、停止以及暂停、急停等运转方式的操作。此外,系统运行状态及报警可在操作盒上显示。操作盒上采用可中、英文切换的操作系统及提示。
4.结束语:
机器人施釉系统的应用极大减轻了卫生洁具施釉工序上工人的劳动强度,提高了产品质量和企业的工作效率。现在正被越来越多的卫生洁具企业所采用,并已经过适当改造后用在了陶瓷生产的其它行业。