新基建背景下,建筑钢结构的需求量与日俱增,也对钢结构的焊接生产加工带来了新的挑战。根据钢结构建筑的使用功能和外部形状,其结构形式可分为以下几种类型∶门式钢架、网架结构、桁架结构、框架结构、超高层结构、特殊结构等。纵观近些年钢结构工程发展趋势,可以用"高、大、特、新、难"概括其结构的特点。
1 需求
目前大量的钢结构焊接生产仍采用人工焊接的形式,由于钢结构焊接工程量巨大、焊接环境恶劣、大型构件作业风险高、焊接劳动强度大,同时,建筑钢结构构件重复率低、非标件多、节点形式复杂、板材厚度大,传统的自动化焊接设备很难高效地应用起来。一时间,钢结构生产企业均出现了焊工短缺、一“工”难求的局面。
针对建筑钢结构的特点,埃夫特携手战略合作伙伴工布智造,开发智能化、系性化焊接装备,推动钢结构企业向智能化、数字化和信息化的转型发展,成为解决钢结构焊接行业的创新解决方案。
2 智能化焊接系统简介
钢结构智能化焊接装备系统,通过视觉识别或构件3D数模导入,识别结构件焊缝位置,并规划机器人路径,再通过激光扫描,精准识别并计算焊缝位置;
焊接工艺专家系统,根据工作要求焊,结合焊接位姿、焊接轨迹和工艺参数,智能化生成埃夫特焊接机器人运行程序,一键启动运行。整个流程无需人工示教,仅需移动鼠标在屏幕上,按顺序点选,即可完成编程。程序传输给机器人控制器,机器人执行程序,完成钢结构焊接工作。


上图示为地轨七轴智能焊接工作站,革新采用焊接机器人视觉技术+机器人自适应智能焊接系统,将机器人示教操作工作量降低95%,实现了机器人焊接由“机器人焊接自动化”转变为“机器人焊接智能化”。此类型智能焊接工作站,特别适用于建筑钢结构真桁架结构及框架结构、门式钢架的立柱、横梁等工件,能帮助客户轻松克服工作中对象重复率低、非标件多、节点形式复杂、板材厚度大等挑战。

上图示为多轴联动智能焊接工作站,综合应用机器人视觉技术+机器人自适应智能焊接系统,同时采用倒挂焊接机器人安装方式,极大地增加了机器人的灵活性和可达性,并可以涵盖各类样式钢结构的焊接生产应用。
3 焊接机器人焊接功能软件
机器人焊接基础软件功能
起弧功能:
埃夫特焊接机器人具备非常优秀的焊接工艺性,在焊接参数界面可分别设置起弧、焊接、收弧参数,实现对整条焊缝的精确控制。
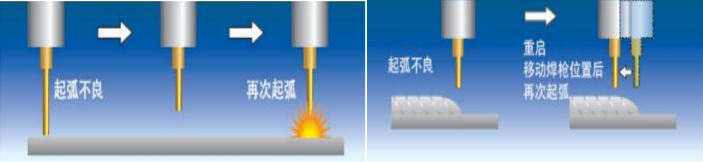
断弧重启:
埃夫特焊接机器人标配电弧检测功能,当机器人检测到设定时间内未起弧时,无需外界干涉,自动再启动起弧功能;当在焊接过程中非正常断弧时,机器人自动记录当前位置,异常排除后,机器人回退一段距离,重新起弧,继续完成整条焊缝。
刮擦起弧:
当工件表面有油污或锈蚀情况时,可能会影响焊接起弧,机器人在起弧位置通过焊丝刮擦工件动作,实现焊接起弧。
焊接参数在线修改:
连续多姿态长焊缝焊接过程中,埃夫特焊接机器人在焊接过程中根据不同的焊枪位姿匹配相应的焊接参数。
摆动焊接:
埃夫特焊接机器人支持正弦、三角、梯形、圆环、8字等平面及立体摆动。
间断焊功能:
高速间断焊,鱼鳞焊;间隔焊,示教直线起点和终点,输入焊缝长度、间隔尺寸,机器人自动规划间隔焊程序。
数字量通讯:
埃夫特焊接机器人支持 CANopen、DeviceNet 现场总线通讯。
接触寻位:
埃夫特焊接机器人通过焊丝或喷嘴搜寻触碰焊接工件,计算工件偏差值,精准确定焊缝位置。
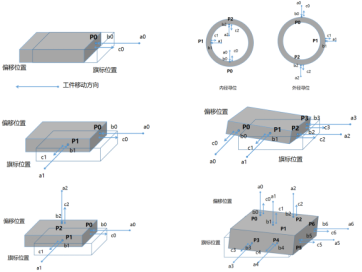
上图示为埃夫特焊接机器人接触寻位功能示意图,目前埃夫特焊接工艺包支持1D、2D、2D+、3D、3D+、圆内外径的接触寻位,实现精准定位。
电弧跟踪:
埃夫特焊接机器人在焊接过程中,通过采集焊接过程中电流值,识别焊接路径的偏差值并实时插补,实现跟踪功能。
激光寻位:
通过激光传感器识别焊缝特征点,计算焊缝起弧点和收弧点,精确定位焊缝,此外埃夫特激光寻位工艺包还支持3点寻位、4点寻位、坐标系寻位等功能。
激光跟踪:
通过焊枪前置安装的激光传感器,实时采集焊接过程中焊缝特征,并将位置信息反馈给机器人,实现机器人的实时跟踪。