课题
目前装硅片的Foup运输环节是由人工完成的,不仅效率低下,而且常与人接触,容易产生灰尘。
解决方案
通过导入欧姆龙自主移动机器人LD系列,配合协作机器人TM系列,实现了全自主的物料运输。
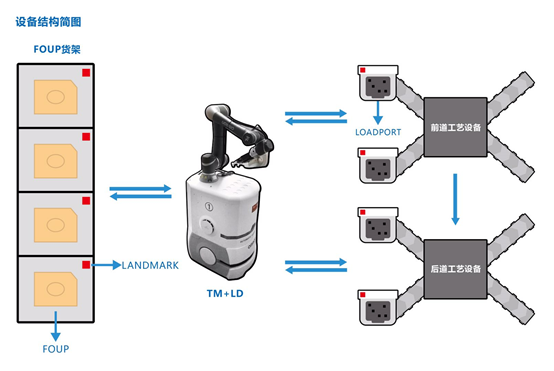
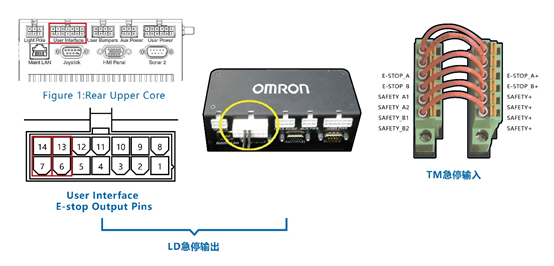
1、TM与LD之间的应用配合
在协作机器人TM系列和自主移动机器人LD系列的通讯配合中,采用网络通讯并不灵活且不能保证通讯的稳定性,因此最终选择了IO接线的方式来通讯,使得TM和LD的每一次交互都稳定可靠。
2、TM Landmark功能应用
协作机器人TM系列可以通过Landmark功能定位工件坐标,可是在与自主移动机器人LD系列搭配应用时,由于LD的定位精度只有±100mm,如果TM相机视野较小,拍照位离Landmark较近的话,±100mm的位置误差会导致拍照时Landmark不在视野范围内;

而如果TM相机视野增大,拍照距离变远的话,虽然可以保证拍到Landmark,但精度会很差,因此我们采用嵌套视觉的方式来拍Landmark。
3、嵌套视觉识别Landmark
通过VISION0709任务,对Landmark进行远距离、大范围的第一次拍照;识别到Landmark之后,机器人会向下移动到离Landmark更近一些的第二个拍照点再次拍照;识别之后,再次向下移动到最终的Landmark拍照位置,这样就保证拍照位置距离Landmark 10cm之内,保证识别精度和坐标精度。
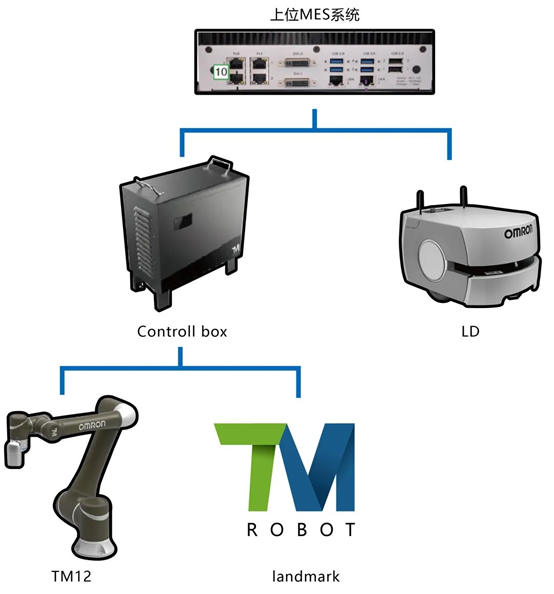
系统配置
协作机器人TM系列搭配自主移动机器人LD系列,是目前欧姆龙主推的应用解决方案,称作Mobile Manipulator(MOMA),通过TM强大的视觉功能,可以挑选和放置各类物品,并搬运至工厂的任何地方,使制造和材料处理变得更加灵活,整体效率大幅提升!
实现价值
1、改变了之前人工搬运Foup的方式,省去了人力,加快了效率。
2、有效减少了与人接触时灰尘的产生,避免了灰尘堆积对产品品质的影响。
3、搬运Foup的精度:±1mm,整体节拍:30次/小时。
【经营层】
■ 半导体硅片FOUP的全自主搬运,技术能力业界领先。
■ 节拍加快至30次/小时,产能大幅提升,设备竞争力向上。
【管理层】
■ 升级为全自动化FOUP运输,简化管理,提升效率
■ 通过可视化界面,监控每一台机器人的状态并适应设施变化,可纵观全局,实时管理工作流,实现效率的最大化。
【工程师层】
■ 有效避免了与人接触时灰尘的产生,大幅减少后期维护工时。
■ 欧姆龙全程参与设计及开发,后期服务也有保障。